פלטפורמת Arduino מאפשרת לאנשים ליצור פרויקטים שונים. Arduino היא פלטפורמה ידידותית למשתמש עם תמיכה במגוון רחב של ספריות, כולל ספריית תוכנה סדרתית . ה ספריית תוכנה סדרתית מאפשר לך ליצור יציאה טורית בכל אחד מהפינים הדיגיטליים בלוח Arduino שלך.
במאמר זה, נצלול עמוק יותר לתוך ספריית SoftwareSerial ונחקור כיצד היא פועלת.
מבוא לספריית תוכנה סדרתית
ה ספריית תוכנה סדרתית היא ספריית ארדואינו סטנדרטית המאפשרת תקשורת טורית על פינים דיגיטליים מלבד TX ו-RX. הספרייה מאפשרת יצירת יציאת תוכנה טורית, שניתן להשתמש בה כדי לתקשר עם מכשירים אחרים, כגון מיקרו-בקרים אחרים, מחשבים או אפילו מודולי בלוטות'. ספריית SoftwareSerial כלולה עם Arduino IDE וניתן להשתמש בה עם כל לוח Arduino.
הערה: בדרך כלל, TX ו RX פינים משמשים לתקשורת טורית אך באמצעות ספרייה זו אנו יכולים לאפשר ללוח Arduino להשתמש בכל אחד מהפינים הדיגיטליים כדי להחליף את פיני ה-TX וה-RX.
הבנת פונקציות ספריית תוכנה סדרתית
ה ספריית תוכנה סדרתית בעל מספר פונקציות המאפשרות לך להגדיר ולשלוט ביציאה הטורית של התוכנה. הנה כמה מהפונקציות העיקריות שכדאי לדעת:
SoftwareSerial()
פונקציה זו יוצרת מופע חדש של SoftwareSerial מעמד. לפונקציה זו יש שני ארגומנטים, פין RX ופין TX. לדוגמה, אם ברצונך ליצור יציאת תוכנה טורית בפינים 2 ו-3, תשתמש בקוד הבא:
SoftwareSerial mySerial ( 2 , 3 ) ; // RX, TX
ה SoftwareSerial() השיטה משמשת ליצירת מופע חדש של a SoftwareSerial לְהִתְנַגֵד. זה מאפשר יצירת מופעים מרובים אולם בכל פעם רק אחד יכול להיות פעיל.
תחביר
התחביר עבור ה SoftwareSerial() השיטה היא כדלקמן:
SoftwareSerial ( rxPin, txPin, inverse_logic )
פרמטרים
הפרמטרים עבור SoftwareSerial() הם
rxPin: פרמטר זה מציין את הסיכה שתשמש לקבלת נתונים טוריים.
txPin: פרמטר זה מציין את הסיכה שתשמש להעברת נתונים סדרתיים.
inverse_logic: פרמטר זה הוא אופציונלי, והוא הופך את תחושת הביטים הנכנסים. ערך ברירת המחדל הוא false, כלומר LOW בפין RX מתפרש כ-0-bit ו-HIGH כ-1-bit. אם מוגדר כ-true, ה-LOW בפין RX יקבל כעת 1-bit ו-HIGH כ-0-bit.
לַחֲזוֹר
ה SoftwareSerial() לא מחזיר כלום.
Arduino SoftwareSerial() פונקציות הספרייה
ארדואינו SoftwareSerial() יש רשימה של פונקציות לתקשורת טורית בין מכשירים. חלק מהפונקציות העיקריות נדונות כאן:
התחל()
ה התחל() הפונקציה מאתחלת את היציאה הטורית של התוכנה עם קצב העברת העברת נתונים. קצב הביאוד הוא מהירות העברת הנתונים דרך היציאה הטורית. לדוגמה, כדי להגדיר את 9600 כקצב הביאוד עבור תקשורת טורית, תשתמש בקוד הבא:
mySerial.begin ( 9600 ) ;
זמין()
ה זמין() f unction מחזירה בתים הזמינים לקריאה ביציאה הטורית של התוכנה. לדוגמה, כדי לבדוק אם יש נתונים זמינים לקריאה, תשתמש בקוד הבא:
אם ( mySerial.available ( ) > 0 ) {// לקרוא נתוני קלט
char incomingByte = mySerial.read ( ) ;
}
לקרוא()
ה לקרוא() הפונקציה קוראת את הבת הבא של נתונים מהיציאה הטורית של התוכנה. לדוגמה, כדי לקרוא בייט של נתונים ולהדפיס אותו לצג הטורי, תשתמש בקוד הבא:
char incomingByte = mySerial.read ( ) ;Serial.println ( incomingByte ) ;
לִכתוֹב()
ה לִכתוֹב() הפונקציה כותבת בייט של נתונים ליציאה הטורית של התוכנה. למשל, לשלוח את המכתב 'א' דרך היציאה הטורית של התוכנה, תשתמש בקוד הבא:
mySerial.write ( 'א' ) ;
Arduino SoftwareSerial() קוד ספרייה לדוגמה
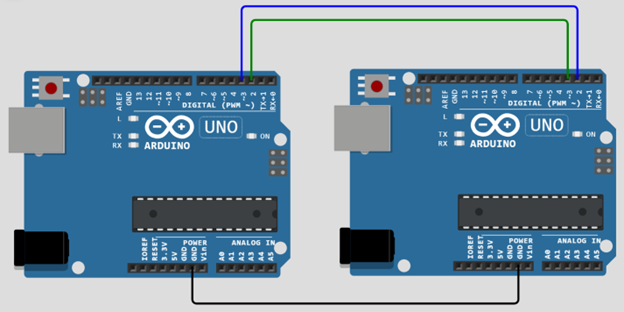
כעת נתקשר בין שני לוחות Arduino באמצעות תקשורת טורית באמצעות ספרייה זו. קח שני לוחות Arduino וחבר אותם כפי שמוצג בתמונה למטה.
לְחַבֵּר ד2 של לוח מאסטר ארדואינו עם D3 של לוח Slave Arduino, התחבר באופן דומה D3 של מאסטר ארדואינו עם ד2 של העבד ארדואינו.
הערה: עבור תקשורת טורית, ה TX פין תמיד מחובר ל- RX סיכה של Arduino ההפוך וה- RX סיכה של המאסטר תמיד מחוברת ל TX סיכה של הארדואינו השני.
להלן החומרה של שני לוחות Arduino.
להלן קוד Arduino לדוגמה המדגים כיצד להשתמש ב- ספריית תוכנה סדרתית ליצור תקשורת בין שני לוחות Arduino:
קוד לוח השולח
הקוד שלהלן מיועד ל-Arduino השולח שיכתוב מחרוזת ללוח Arduino המקבל.
#include// הגדר אובייקט סידורי של תוכנה
SoftwareSerial mySerial ( 2 , 3 ) ;
הגדרה בטלה ( ) {
// התחל את התקשורת הטורית
Serial.begin ( 9600 ) ;
בזמן ( ! סידורי ) {
; // לַחֲכוֹת ל יציאה טורית לחיבור
}
// הפעל את התקשורת הטורית של התוכנה
mySerial.begin ( 9600 ) ;
}
לולאה ריקה ( ) {
// שלח הודעה דרך החיבור הטורי של התוכנה
mySerial.println ( 'שלום, לוח מקלטים!' ) ;
לְעַכֵּב ( 1000 ) ;
}
קוד לוח מקלט
הקוד שלהלן מיועד ללוח המקלט. באמצעות קוד זה Arduino יקבל את המחרוזת מלוח אחר על פני תקשורת טורית שנוצרה בין שני לוחות Arduino.
#include// הגדר אובייקט סידורי של תוכנה
SoftwareSerial mySerial ( 2 , 3 ) ;
הגדרה בטלה ( ) {
// התחל את התקשורת הטורית
Serial.begin ( 9600 ) ;
בזמן ( ! סידורי ) {
; // לַחֲכוֹת ל יציאה טורית לחיבור
}
// הפעל את התקשורת הטורית של התוכנה
mySerial.begin ( 9600 ) ;
}
לולאה ריקה ( ) {
// חשבון אם הנתונים זמינים בחיבור הטורי של התוכנה
אם ( mySerial.available ( ) ) {
// קרא את הנתונים והדפיס אותם לצג הטורי
Serial.println ( mySerial.readString ( ) ) ;
}
}
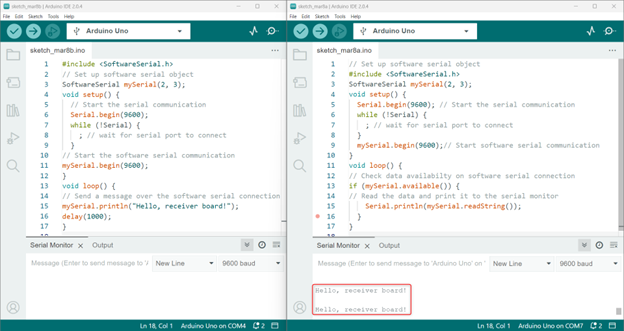
בדוגמה זו, אנו כוללים תחילה את ספריית תוכנה סדרתית בתחילת הקוד. לאחר מכן, אנו יוצרים א SoftwareSerial חפץ שנקרא ' mySerial 'עם פינים 2 ו-3 שצוינו בתור פיני RX ו-TX, בהתאמה.
בתוך ה להכין() פונקציה, אנו מתחילים גם את התקשורת הטורית של החומרה וגם את התקשורת הטורית של התוכנה עם קצב העברת העברת נתונים של 9600. ב- לוּלָאָה() פונקציה של לוח השולח, אנו שולחים הודעה דרך החיבור הטורי של התוכנה באמצעות שיטת mySerial.println() ומחכים שנייה לפני שליחת ההודעה הבאה.
בפונקציית loop() של לוח המקלט, הקוד יבדוק זמינות נתונים טוריים בחיבור הטורי של התוכנה באמצעות mySerial.available() שיטה. אם יש נתונים זמינים, אנו קוראים את הנתונים באמצעות שיטת mySerial.readString() ומדפיסים אותם לצג הטורי באמצעות שיטת Serial.println() .
מגבלות של ספריית SoftwareSerial()
ה ספריית תוכנה סדרתית יש כמה יתרונות שונים אבל יש גם כמה מגבלות שמשתמשים צריכים להיות מודעים להן. מגבלות אלו כוללות
- חוסר יכולת לשדר ולקבל נתונים בו זמנית.
- בעת שימוש במספר יציאות טוריות של תוכנה, רק יציאה אחת יכולה לקבל נתונים בבת אחת.
- היציאות הטוריות מבוססות התוכנה שנוצרו באמצעות ספרייה זו פועלות בקצבי העברת נתונים נמוכים יותר ואינן אמינות כמו יציאות טוריות מבוססות חומרה.
- כמה פינים על לוחות Mega ומגה 2560 אינם תומכים בהפסקות שינוי עבור RX, מה שמגביל באילו פינים ניתן להשתמש.
- באופן דומה, על לוחות Leonardo ו-Micro, ניתן להשתמש רק בפינים מסוימים עבור RX עקב היעדר הפסקות שינוי.
- מהירות ה-RX המקסימלית על לוחות Arduino או Genuino 101 היא 57600 bps.
- RX לא עובד על פין דיגיטלי 13 של לוחות Arduino או Genuino 101.
| גלשן | פיני RX |
| מגה ומגה 2560 | 10, 11, 12, 13, 14, 15, 50, 51, 52, 53, A8 (62), A9 (63), A10 (64), A11 (65), A12 (66), A13 (67), A14 (68), A15 (69).
|
| לאונרדו ומיק | 8, 9, 10, 11, 14 (MISO), 15 (SCK), 16 (MOSI). |
סיכום
ה ספריית תוכנה סדרתית ב- Arduino הוא כלי שימושי לתקשורת עם מכשירים באמצעות פרוטוקולי תקשורת טוריים. זה מאפשר למפתחים ליצור יציאות טוריות מבוססות תוכנה שניתן להשתמש בהן בשילוב עם יציאות טוריות מבוססות חומרה. לספרייה זו יש מגבלות מסוימות מכיוון שהיא אינה מאפשרת העברת נתונים בו זמנית. לפרטים נוספים קרא את המאמר למעלה.