לפני שנתחיל להתממשק ESP32 עם חיישן PIR עלינו לדעת כיצד פועלות פסיקות וכיצד לקרוא ולטפל בהן ב-ESP32. בואו נדון בפירוט על פעולת PIR עם ESP32.
להלן התוכן למאמר זה:
2: קריאה לפסיקה ב-ESP32 - MicroPython
3: חיישן PIR ממשק עם ESP32 - MicroPython
3.1: חיישן תנועה PIR (HC-SR501)
1: מהן הפרעות
רוב האירועים שקורים בתכנות ESP32 פועלים ברצף, כלומר ביצוע שורה אחר שורה של קוד. כדי לטפל ולשלוט באירועים שאינם צריכים לפעול במהלך ביצוע רציף של קוד an מפריע משומשים.
לדוגמה, אם אנו רוצים לבצע משימה מסוימת כאשר מתרחש אירוע מיוחד כלשהו, או שניתן אות טריגר לפינים דיגיטליים של המיקרו-בקר אנו משתמשים בפסיקה.
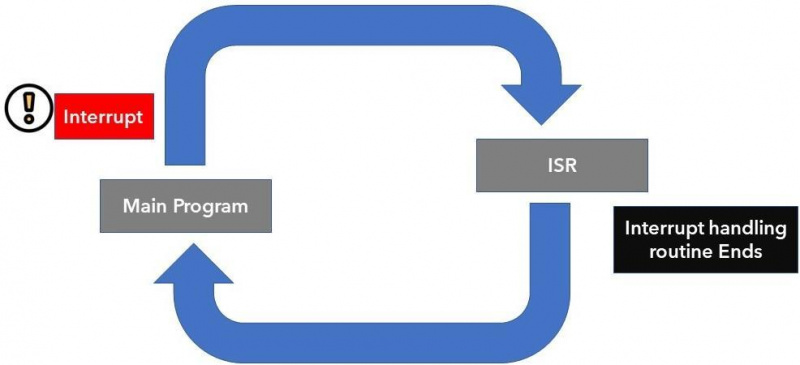
עם הפרעה אנחנו לא צריכים לבדוק ברציפות את המצב הדיגיטלי של פין הקלט ESP32. כאשר מתרחשת הפרעה, המעבד עוצר את התוכנית הראשית, ונקראת פונקציה חדשה המכונה ISR ( שגרת שירות להפריע ). זֶה ISR הפונקציה מטפלת בפסיקה שנגרמה לאחר מכן חזרה לתוכנית הראשית והתחלת להפעיל אותה. אחת הדוגמאות של ISR היא חיישן תנועה PIR אשר יוצר פסיקה ברגע שמזהים תנועה.
1.1: קוטע פינים ב-ESP32
הפרעה חיצונית או חומרה יכולה להיגרם מכל מודול חומרה כגון חיישן מגע או כפתור. הפסקות מגע מתרחשות כאשר מזוהה מגע בפינים של ESP32 או פסיקת GPIO יכולה לשמש גם כאשר מקש או כפתור נלחץ.
במאמר זה נפעיל הפרעה כאשר התנועה מזוהה באמצעות חיישן PIR עם ESP32.
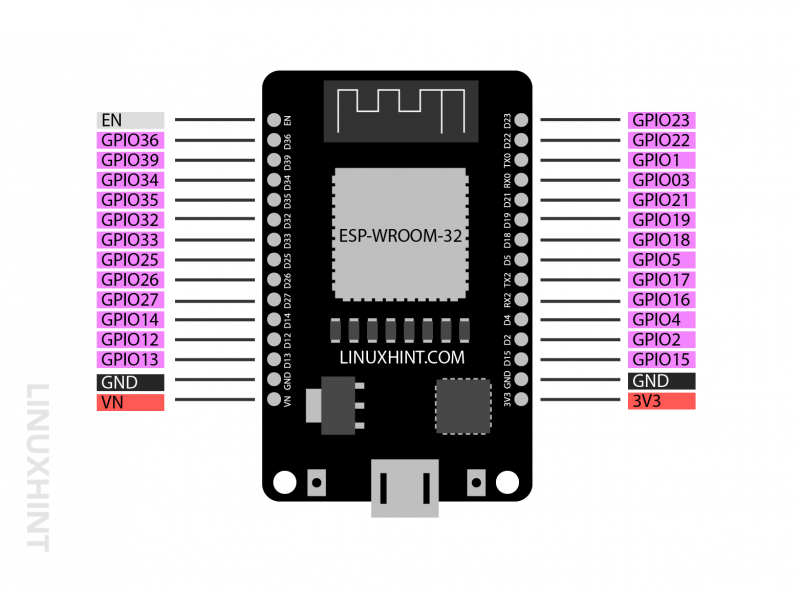
כמעט כל פיני GPIO מלבד 6 פינים משולבים SPI שבדרך כלל מגיעים ב- 36 לא ניתן להשתמש בגרסת ה-pin של לוח ESP32 למטרת הפרעה בשיחות. אז כדי לקבל את ההפסקה החיצונית להלן הפינים שבהם אפשר להשתמש ב-ESP32:
2: קריאה לפסיקה ב-ESP32 באמצעות MicroPython
לתכנות לוח ESP32 עם חיישן PIR באמצעות קוד MicroPython. עלינו להגדיר פונקציית פסיקה. להלן מספר שלבים פשוטים המסייעים בהגדרת פסיקה עבור לוח ESP32.
שלב 1: אתחול פונקציית טיפול בפסיקה: יש להגדיר את פונקציית הטיפול בפסיקות בצורה קלה כך שתוכל לפעול במהירות ולחזור חזרה לתוכנית הראשית במהירות האפשרית. ניתן לעשות זאת על ידי הגדרת משתנה גלובלי כך שניתן יהיה לגשת אליו בכל מקום בתוך הקוד אם קוראים לו.
כאן במקרה של חיישן PIR נשתמש בפין GPIO בתור גלוֹבָּלִי מִשְׁתַנֶה. פונקציית הפסיק תקח סיכה כארגומנט ותתאר את פין GPIO שגורם לפונקציית הפסיק להתרחש.
def handle_interrupt ( פִּין ) :שלב 2: הגדר את סיכת ה-GPIO להפסקה: כדי לקבל את הערך של פין GPIO עלינו ליצור אובייקט שייקח ממנו קלט באמצעות ה- PIN.IN כטיעון השני בתוך כיתת הסיכות שלנו. אנחנו יכולים לשנות את השם הזה לכל אחר.
פִּין = פִּין ( 13 , פִּין. IN )שלב 3: חבר פסיקה לפין GPIO עבור חיישן PIR בשיטת irq():
באמצעות הפקודה למטה, נוכל להגדיר את ההפרעה לפין שהגדרנו קודם לכן.
הגשר. irq ( הדק = פִּין. IRQ_RISING , מטפל = handle_interrupt )ה irq() השיטה משמשת לחיבור ההפסקה לפין. irq() מקבל שני טיעונים שונים:
- הדק
- מטפל
הדק: טיעון זה מסביר את אופן ההדק. להלן שלושה מצבים:
- Pin.IRQ_FALLING: כאשר סיכה עוברת מ-HIGH ל-LOW, מתחילה פסיקה.
- Pin.IRQ_RISING: עם המעבר של הסיכה מ-LOW ל-HIGH, מופעלת הפרעה.
- Pin.IRQ_FALLING|Pin.IRQ_RISING: הפעל את ההפרעה בכל פעם שפיכה משנה את מצבה. כל אחת מהסיכות עוברת ל-HIGH או LOW.
מטפל: פונקציה זו תיקרא ברגע שתופעל הפרעה.
3: חיישן PIR ממשק עם ESP32
כפי שכרגע כיסינו את המושגים של פסיקה עם ESP32 באמצעות MicroPython, כעת נממשק את חיישן ה-PIR עם ESP32. כאן נשתמש Pin.IRQ_RISING מצב בקוד MicroPython עבור חיישן PIR מכיוון שאנו רוצים להפעיל נורית בכל פעם שחיישן ה-PIR מזהה תנועה כלשהי. LED זה יישאר דולק למשך זמן מוגדר ואז הוא נכבה.
הרכיבים הבאים יידרשו:
- לוח פיתוח ESP32
- חיישן תנועה PIR (HC-SR501)
- נגד 220 אוהם
- חוטי מגשר
- קרש לחם
- לד
סכמטי עבור חיישן PIR עם ESP32:
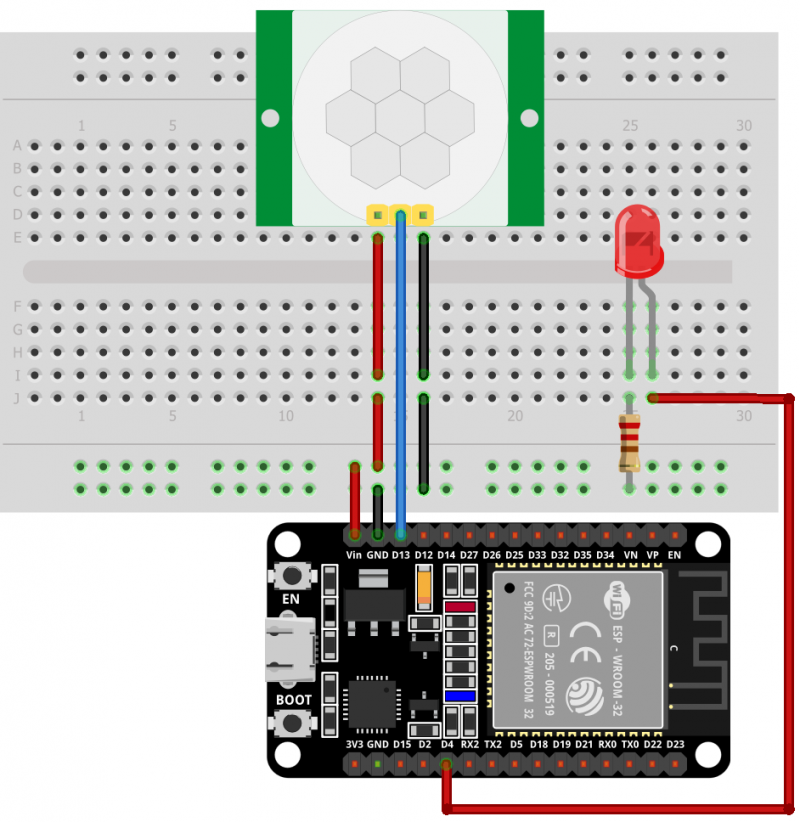
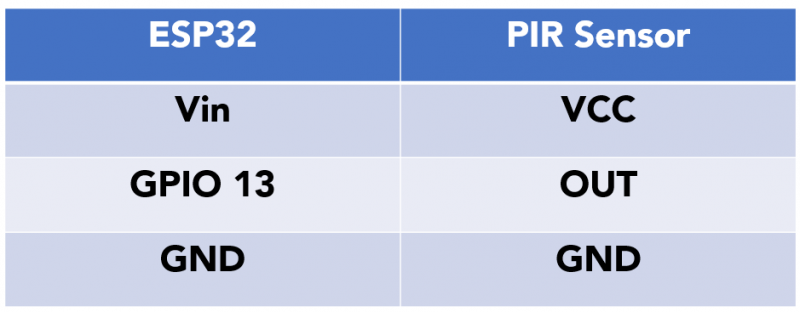
תצורת פינים של ESP32 עם חיישן PIR היא:
3.1: חיישן תנועה PIR (HC-SR501)
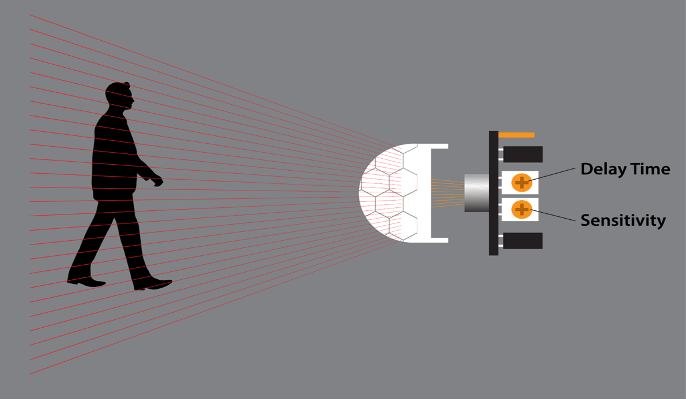
PIR הוא ראשי תיבות של חיישני אינפרא אדום פסיביים . שני חיישנים פירואלקטריים המשמשים יחד שיזהו את כמות החום סביב סביבתו. שני החיישנים הפירואלקטריים הללו מונחים בזה אחר זה וכאשר חפץ נכנס לטווח שלהם, שינוי באנרגיית החום או הפרש האותות בין שני החיישנים הללו גורם לפלט חיישן ה-PIR להיות נמוך. ברגע ש-PIR out יורד ל-LOOW, נוכל להגדיר הוראה ספציפית לביצוע (הבהוב LED).
להלן המאפיינים של חיישן PIR:
- ניתן להגדיר רגישות בהתאם למיקום הפרויקט (כגון חישת תנועת עכבר או עלים)
- ניתן להגדיר חיישן PIR למשך כמה זמן הוא מזהה אובייקט
- בשימוש נרחב באזעקות אבטחה ביתיות ויישומי זיהוי תנועה מבוססי תרמית אחרים.
3.2: Pinout HC-SR501
PIR HC-SR501 מגיע עם שלושה פינים. שניים מהם הם פיני חשמל עבור Vcc ו-GND ואחד הוא פין הפלט עבור אות ההדק.
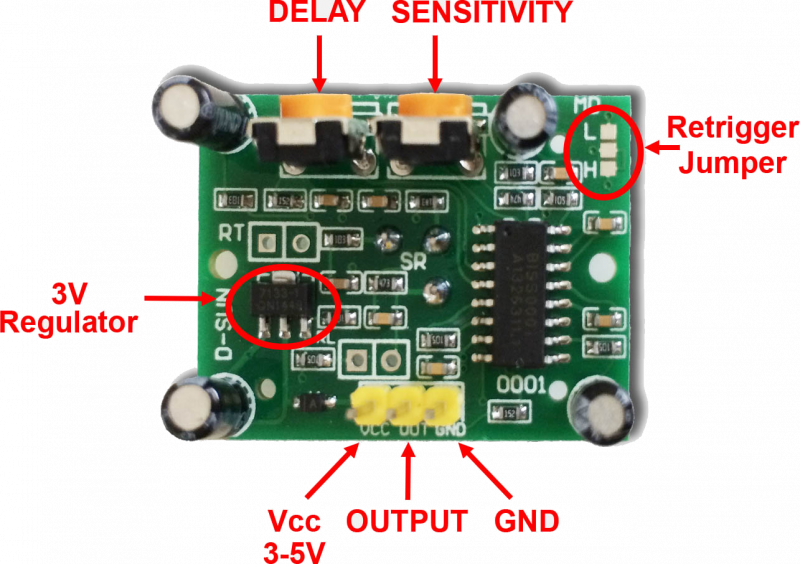
להלן התיאור של פיני חיישן PIR:
| פִּין | שֵׁם | תיאור |
| 1 | Vcc | פין קלט לחיישן התחבר לפין Vin ESP32 |
| שתיים | הַחוּצָה | פלט חיישן |
| 3 | GND | חיישן GND |
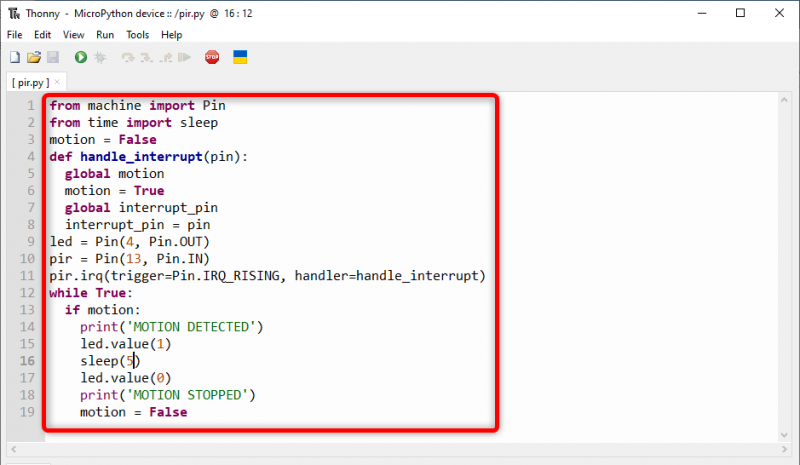
כעת כדי לתכנת את ESP32 כתוב את הקוד הנתון בעורך Thonny IDE או כל MicroPython IDE אחר והעלה אותו ל-ESP32.
מ-PIN של ייבוא מכונהמ זְמַן לייבא שינה
תְנוּעָה = שֶׁקֶר
def handle_interrupt ( פִּין ) :
תנועה גלובלית
תְנוּעָה = נָכוֹן
גלובלי interrupt_pin
interrupt_pin = פִּין
לד = פִּין ( 4 , פִּין. הַחוּצָה )
הגשר = פִּין ( 13 , פִּין. IN )
הגשר. irq ( הדק = פִּין. IRQ_RISING , מטפל = handle_interrupt )
בזמן נָכוֹן :
אם תְנוּעָה :
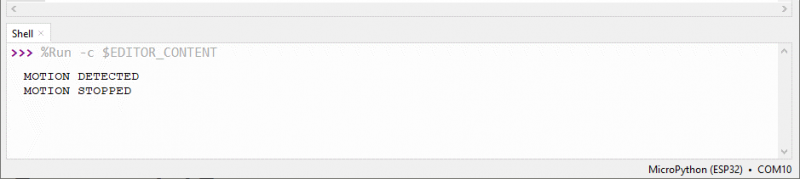
הדפס ( 'זוהתה תנועה' )
לד. ערך ( 1 )
לִישׁוֹן ( 5 )
לד. ערך ( 0 )
הדפס ( 'התנועה נעצרה' )
תְנוּעָה = שֶׁקֶר
ראשית, ייבאנו את פִּין מחלקה ממודול המכונה ו לִישׁוֹן שיטה להוסיף עיכוב. לאחר מכן נוצר משתנה עם שם תְנוּעָה. משתנה זה יזהה אם מזוהה תנועה או לא.
ואז יצרנו פונקציה handle_interrupt. בכל פעם שחיישן ה-PIR מזהה תנועה, פונקציה זו תופעל. זה לוקח סיכה כפרמטר קלט ומציין את הפין שגורם להפרעה לקרות.
במילים פשוטות בכל פעם ש-PIR מזהה תנועה, handle_interrupt יגדיר את משתנה התנועה ל-true ויאחסן את הפין שגורם להפרעה לקרות. דבר אחד שצריך לזכור תמיד מצהיר על תְנוּעָה משתנה כגלובל מכיוון שהוא נחוץ בכל הקוד.
בהמשך יצרנו שני אובייקטים פינים, אחד לאחסון פיני LED והשני יקח פלט חיישן PIR בפין GPIO 13. בהמשך הכרזנו על פין ההדק ב עוֹלֶה מצב.
בתוך ה לוּלָאָה חלק מהקוד, הוא יבדוק את הערך של משתנה התנועה ברגע שהוא יהפוך לאמיתי LED יידלק מחובר בפין 4 של ESP32. אם נורית הפסקת התנועה תכבה לאחר 5 שניות.
3.4: פלט
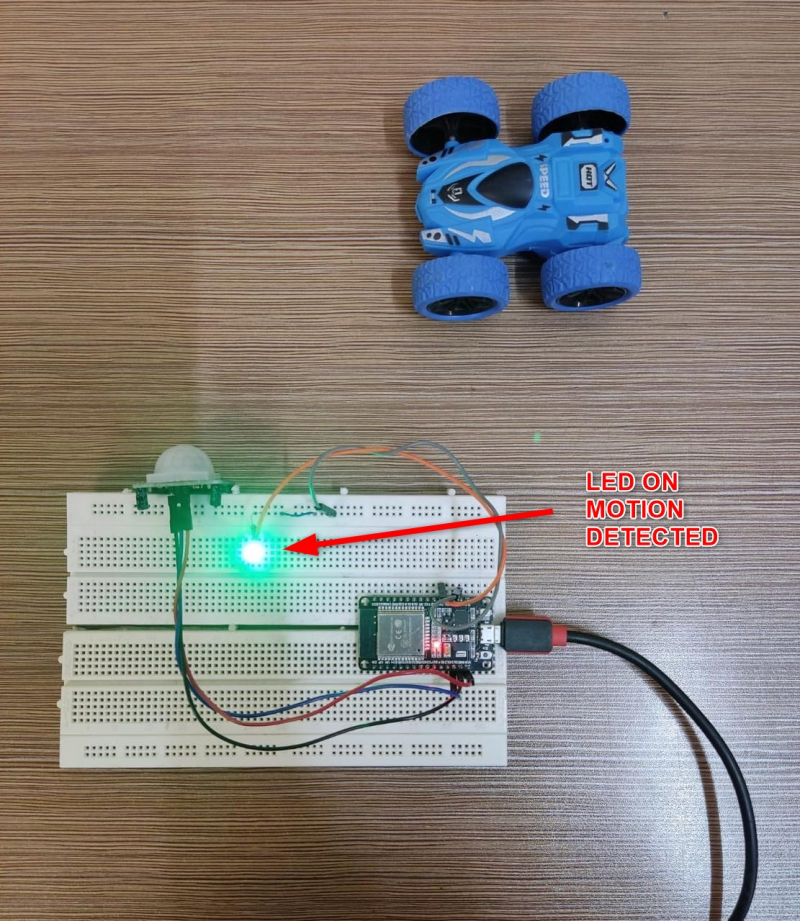
בקטע הפלט אנו יכולים לראות שהאובייקט נמצא מחוץ לטווח של חיישן ה-PIR, כך שה לד מופנה כבוי .
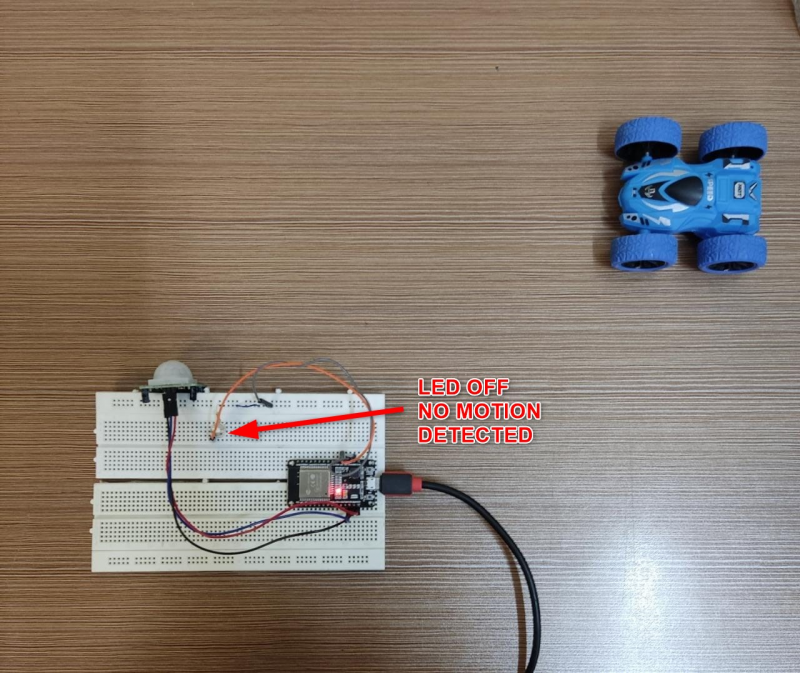
כעת התנועה שזוהתה על ידי נורית חיישן PIR תסתובב עַל ל 5 שניות לאחר מכן אם לא תזוהה תנועה היא תישאר כבוי עד לקבלת הטריגר הבא.
הפלט הבא מוצג על ידי מעטפת/טרמינל בתוני IDE.
סיכום
חיישן PIR עם ESP32 יכול לעזור לזהות תנועה של דברים שונים. באמצעות פונקציית ההפסקה ב-MicroPython עם ESP32 נוכל להפעיל תגובה באיזה פין GPIO ספציפי. כאשר מזוהה שינוי, פונקציית ההפסקה תופעל ונורית תדלק.